Team Yeti
Autonomous Snowplow Competition
The purpose of this competition is to challenge university and college students, as well as the general public, to design, build, and operate a fully autonomous snowplow to remove snow from a designated path.
The objectives of this competition include encouraging students and individuals to utilize the state of the art in navigation and control technologies to rapidly, accurately, and safely clear a path of snow.
Robot
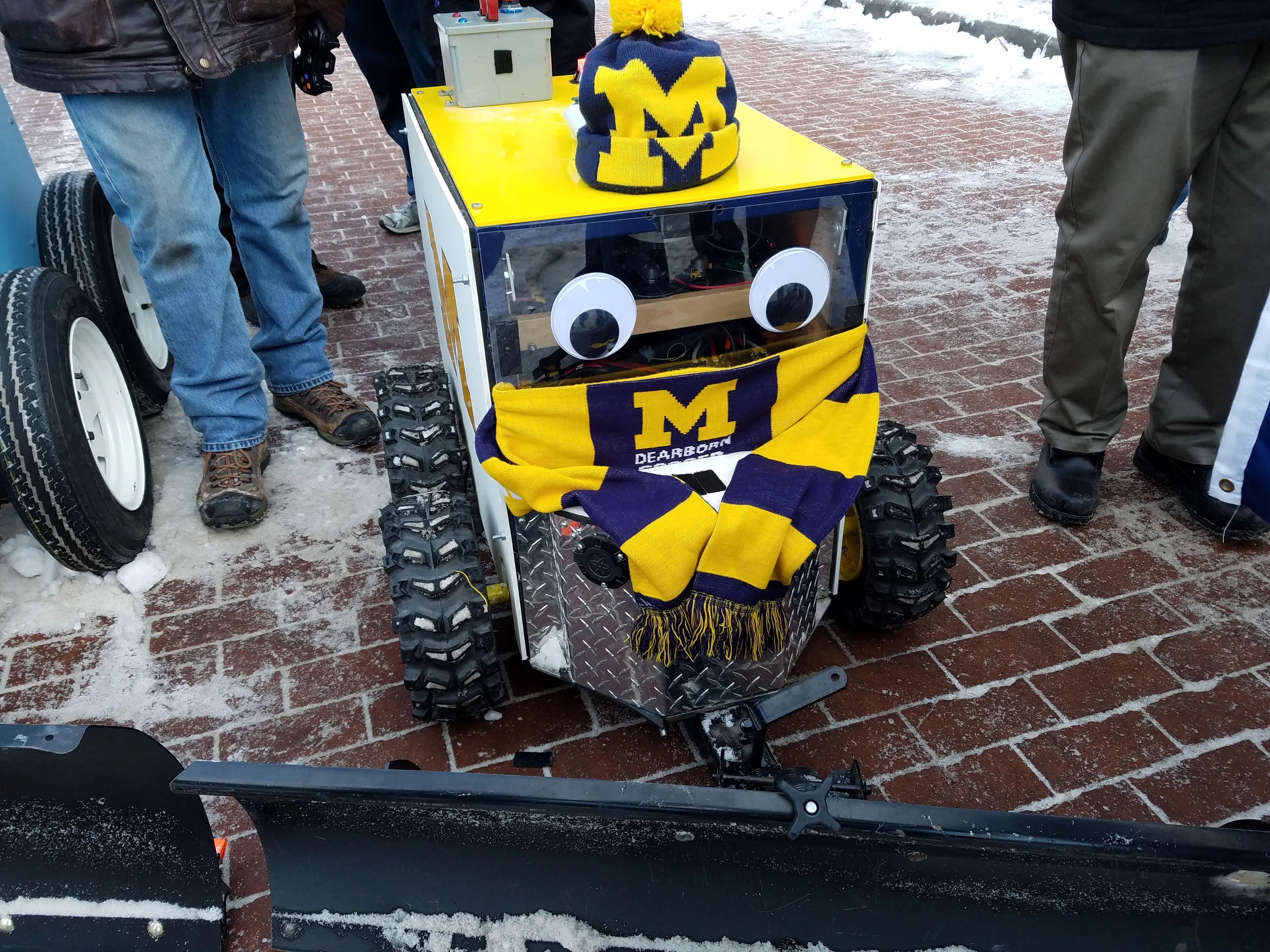
Yeti is the hefty autonomous robot that the Intelligent Systems Club brings to the annual Autonomous Snowplow Competition. She is composed of a depth camera, a 3D Lidar as well as other various sensors. Thanks to the data provided by them, Yetis Navigation software can position her in a map and guide her through a path with obstacles to plow an area of snow. Yeti is constantly evolving. We have teams working on converting her software over to ROS2 foxy, rebuilding her frame and redesigning her electric circuits.
Team Ohm

Intelligent Ground Vehicle Competition
Ohm is an autonomous platform that competes in the annual Intelligent Ground Vehicle Competition (IGVC). IGVC is hosted by the Ground Vehicle Systems Center (GVSC), a division of the US Army devoted to researching and creating the next generation of combat vehicles. Teams design and build a robot to navigate through an outdoor obstacle course. These robots must use lane detection, obstacle avoidance, and GPS navigation to complete the course.
The technologies involved in the IGVC come from a wide range of disciplines and are those of great current interest in both industry and engineering education. Engineering students in all disciplines today would do well to have a familiarity with each of these technologies.
Robot
Ohm is the robot that the Intelligent Systems Club brings to competition. Ohm uses a camera and image processing to detect lanes, Lidar to detect obstacles, and a GPS receiver for absolute positioning. These sensors provide data to our processor, which uses Robot Operating System (ROS) to map the robot's current position and create a path around all obstacles to the goal. Each year our team makes major modifications to the software, electronics, and mechanical system so that our robot remains highly competitive.